通過(guò)氣泡微型機(jī)器人進(jìn)行微操作和裝配
近日,中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化研究所科研團(tuán)隊(duì)在微型機(jī)器人及微操作領(lǐng)域取得新進(jìn)展,相關(guān)成果以2D to 3D Manipulation and Assembly of Microstructures Using Optothermally Generated Surface Bubble Microrobots為題發(fā)表于國(guó)際著名學(xué)術(shù)期刊Small(中科院一區(qū)TOP類期刊,影響因子10.856)。
工程技術(shù)與生命科學(xué)相結(jié)合已成為科技創(chuàng)新的前沿方向之一,將載有細(xì)胞的微凝膠結(jié)構(gòu)排列、組裝成特定的構(gòu)型并培養(yǎng)成具有特定生物功能的組織結(jié)構(gòu),對(duì)于藥物研發(fā)、生物傳感以及類生命機(jī)器人研究等方面具有重要的意義。然而,微結(jié)構(gòu)的操作和組裝,特別是三維姿態(tài)的控制和復(fù)雜構(gòu)型的裝配,依然面臨著諸多挑戰(zhàn)。
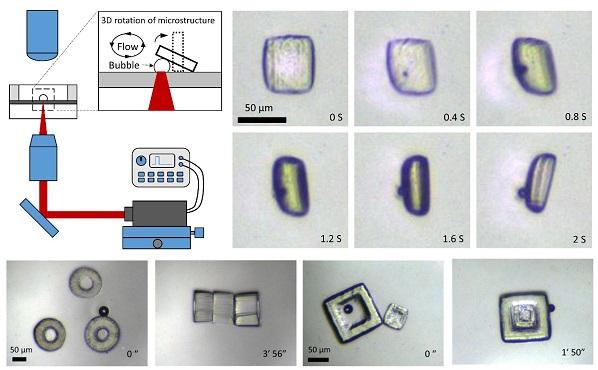
沈陽(yáng)自動(dòng)化所微納米課題組針對(duì)上述問(wèn)題利用液體環(huán)境中的氣泡作為微型機(jī)器人,對(duì)微結(jié)構(gòu)進(jìn)行三維操作和組裝。科研人員研究了光熱效應(yīng)產(chǎn)生和控制氣泡的方法,利用氣泡微型機(jī)器人對(duì)水凝膠微結(jié)構(gòu)進(jìn)行了多種操作,包括二維移動(dòng)、旋轉(zhuǎn)和三維翻轉(zhuǎn)等,實(shí)現(xiàn)了對(duì)微結(jié)構(gòu)的三維姿態(tài)控制。綜合上述操作方法,通過(guò)氣泡微型機(jī)器人可將多個(gè)微模塊組裝成復(fù)雜的三維結(jié)構(gòu),為微結(jié)構(gòu)的操作及裝配,體外構(gòu)建生物組織結(jié)構(gòu)提供了新的解決方案。