近日,中國科學院沈陽自動化研究所排爆機器人課題組提出了一種可用于空地系統的無人機目標跟蹤方法,可使無人機與地面排爆機器人組成空地系統進行協同作業,提高了排爆機器人的作業效率和作業能力。
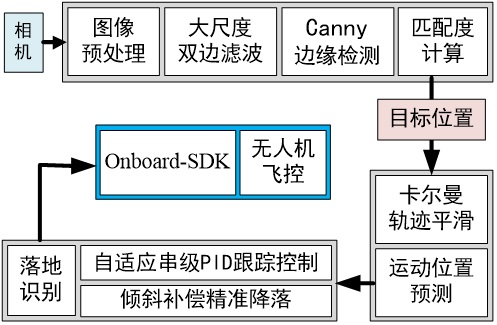
系統軟件架構
現有的排爆機器人在作業時,操作者主要依靠機器人所搭載的攝像機等傳感器所反饋的數據,來分析現場情況及完成抓取作業。然而,機器人所攜帶的攝像機視角有限,容易受到建筑物以及廢墟等的遮擋,不能對事件現場進行全局觀察分析,作業效率較低。
針對上述問題,科研人員設計并實現了基于視覺技術的車載無人機系統。此無人機搭載在地面的排爆機器人上,可根據需要一鍵起飛,并且能實時跟蹤地面機器人進行協同飛行,為地面機器人提供第三視角。也可以遙控進行遠程偵查,主動目標搜索,對現場環境進行預先判斷,抓取作業時可為操作手提供第三視角進行輔助等。執行完任務后無人機可一鍵自主返航,并且精確降落在地面機器人平臺上,然后隨機器人一同返回。該研究得到了國家重點研發計劃的支持。
沒有賬號?請注冊會員